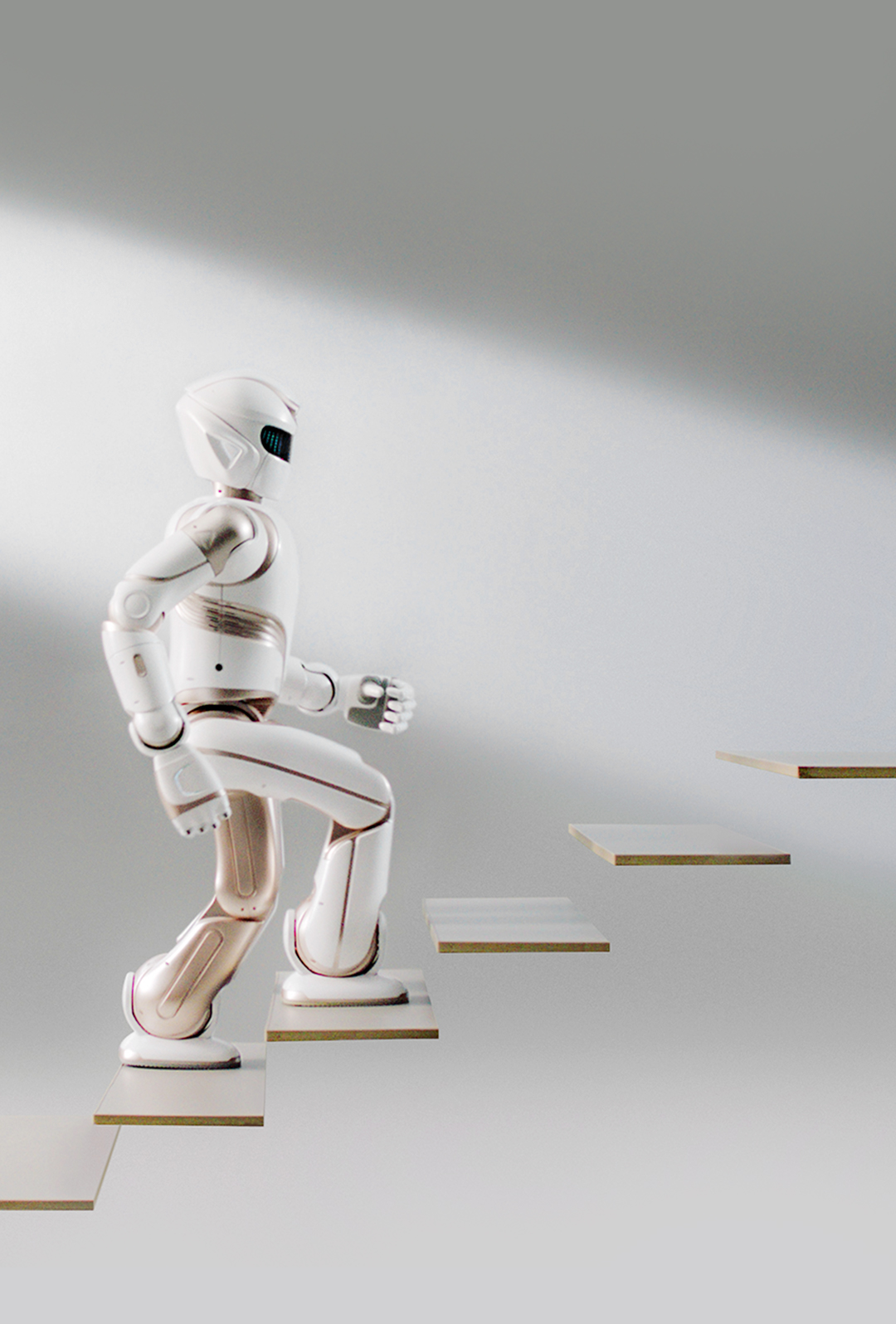





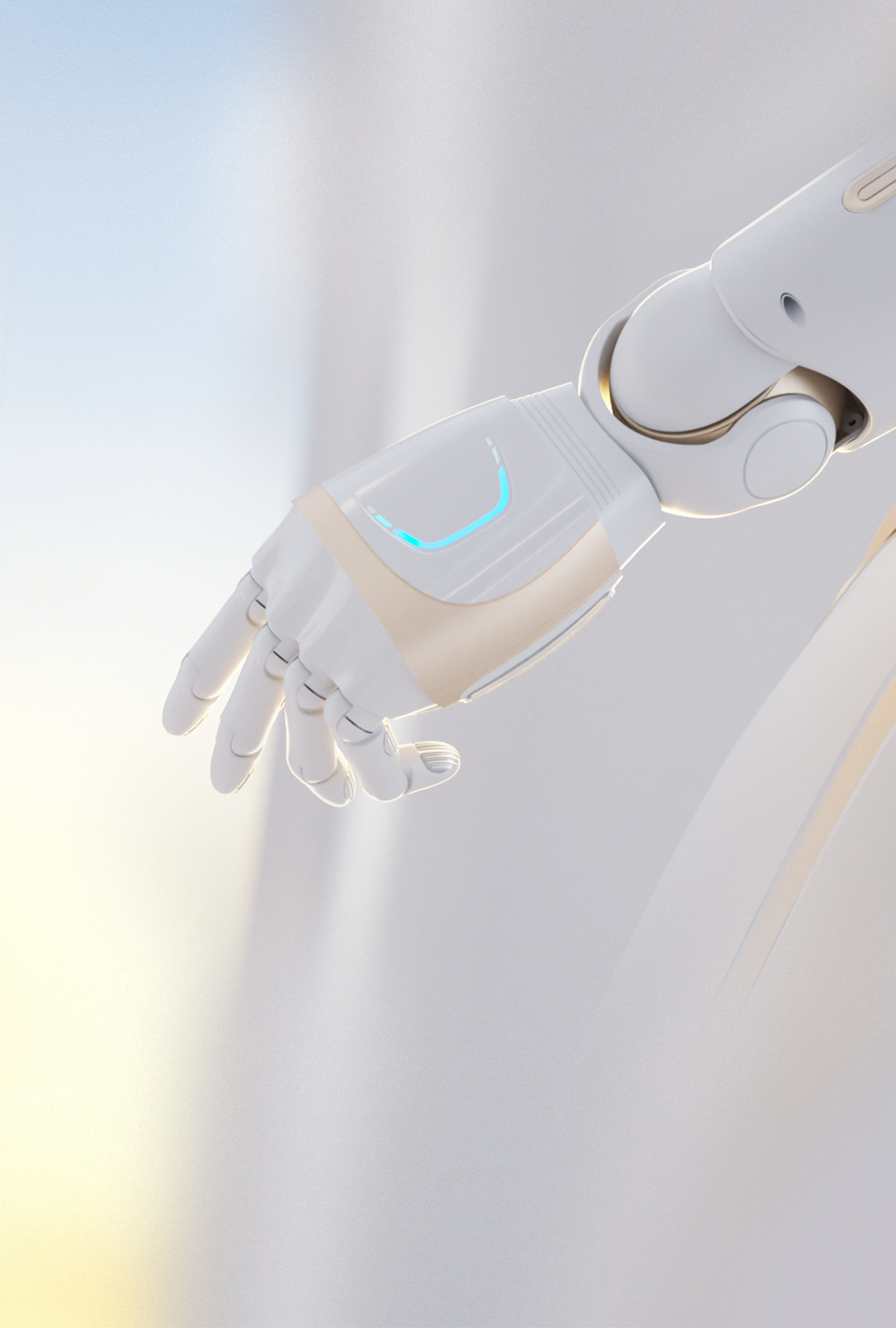
New Appearance
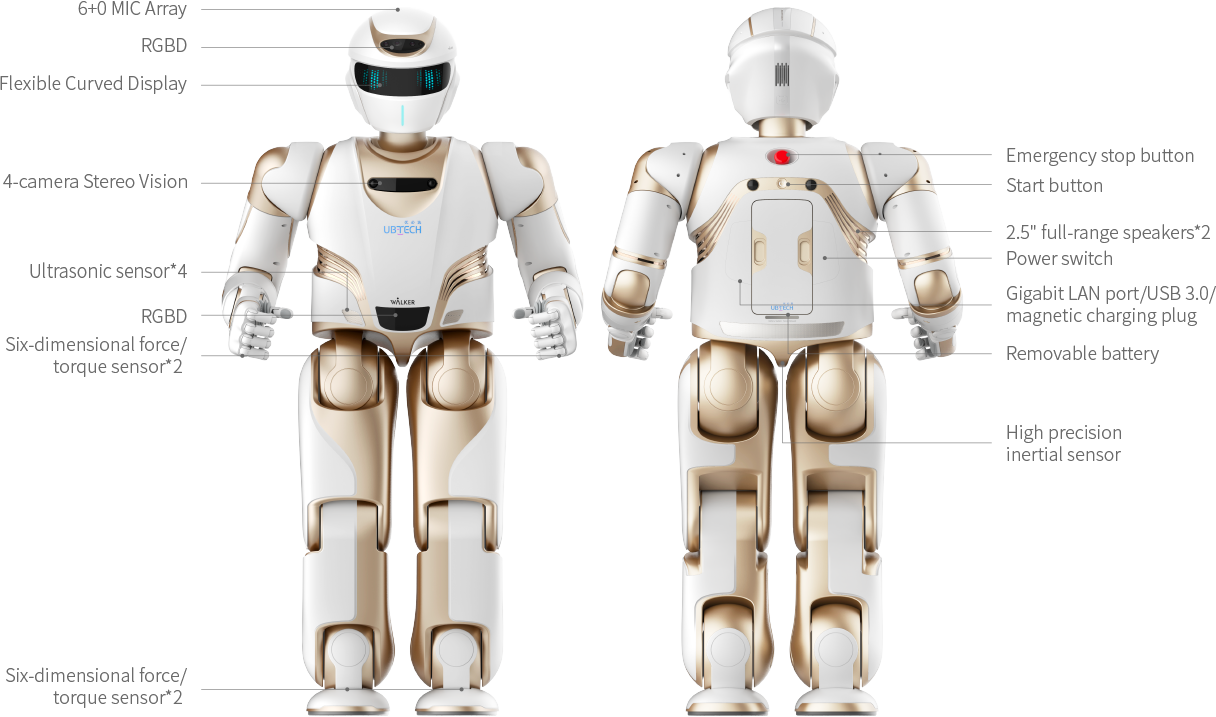
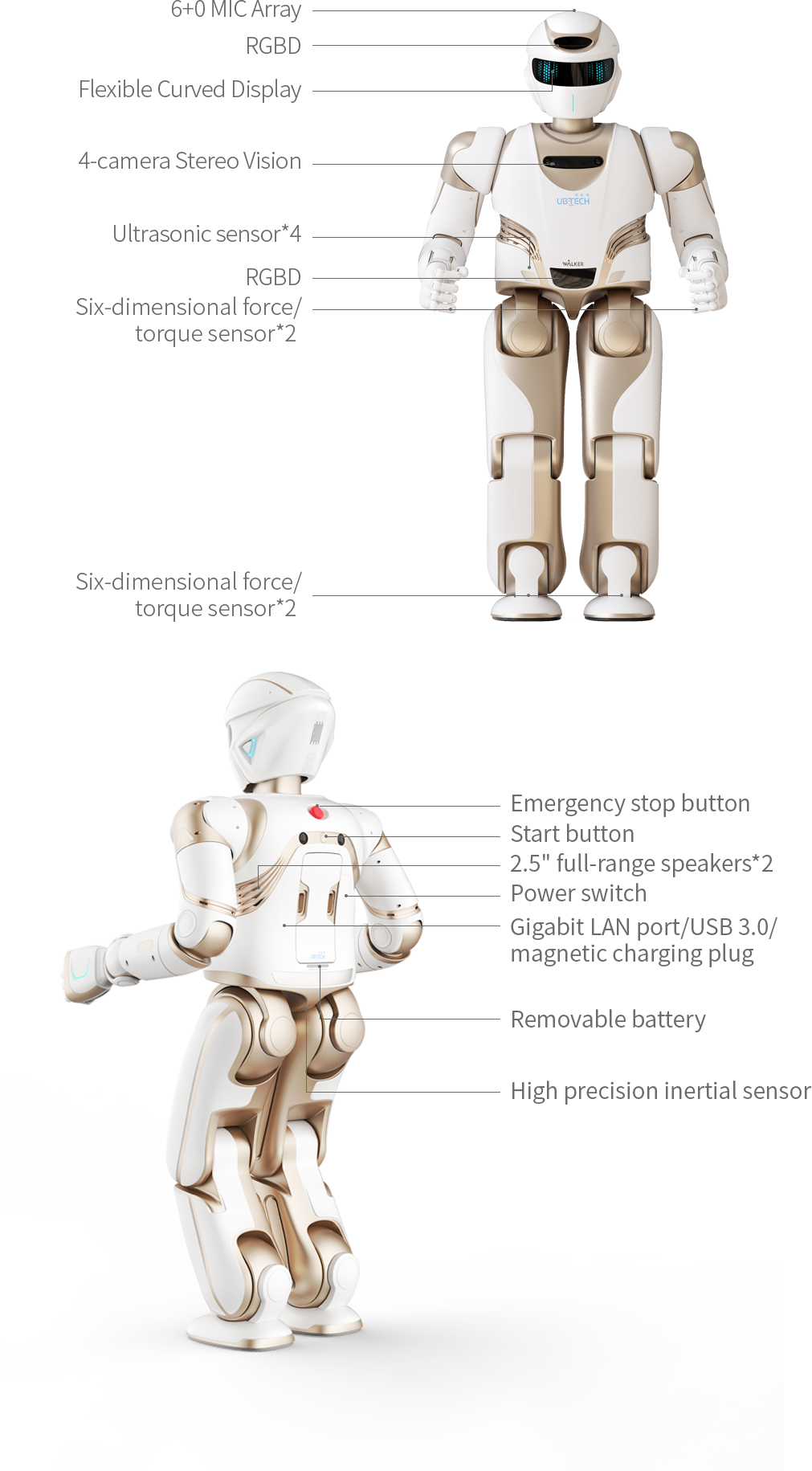
Comprehensive Perception System
 Height: 130cm Weight: 63kg
Height: 130cm Weight: 63kg 41 high-performance servo joints
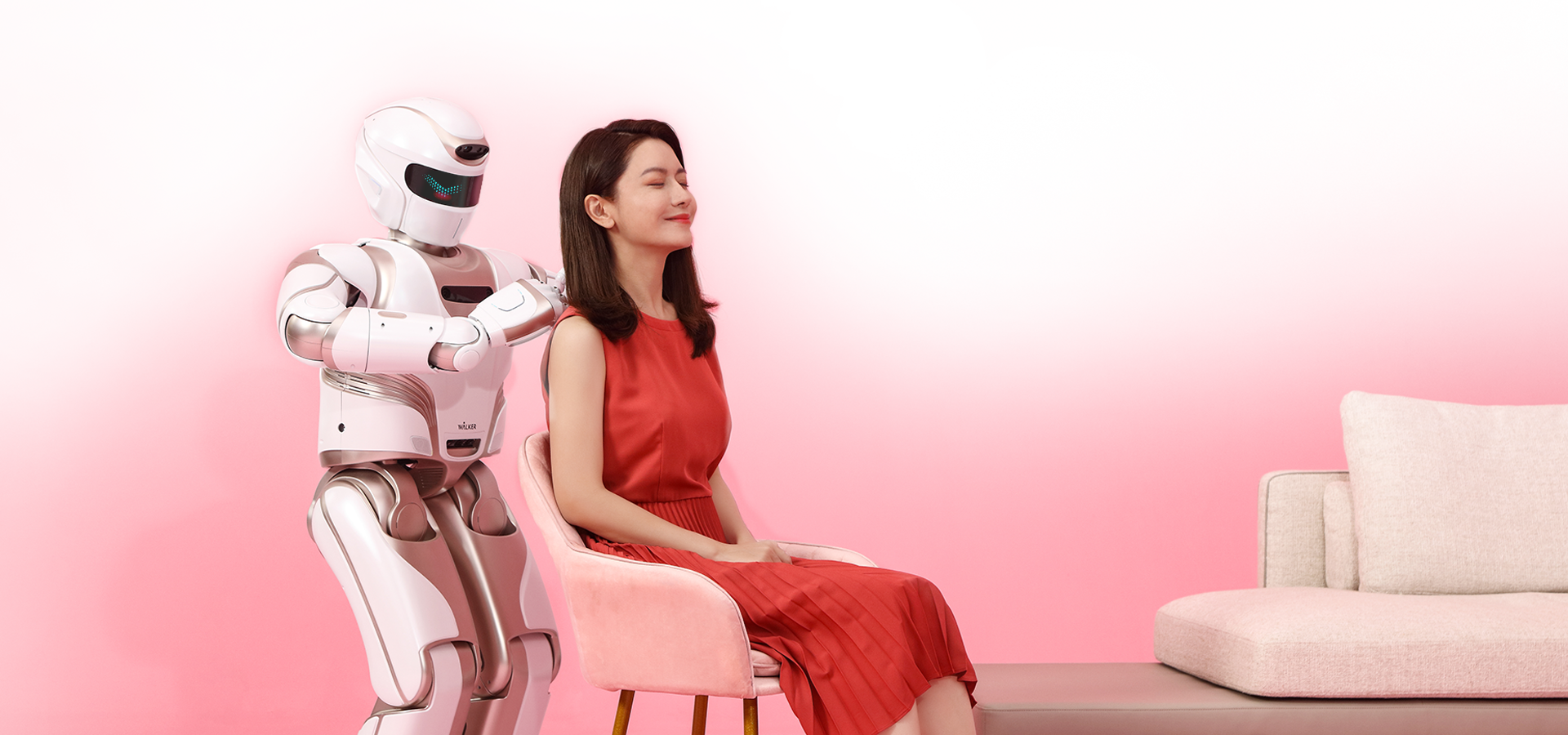
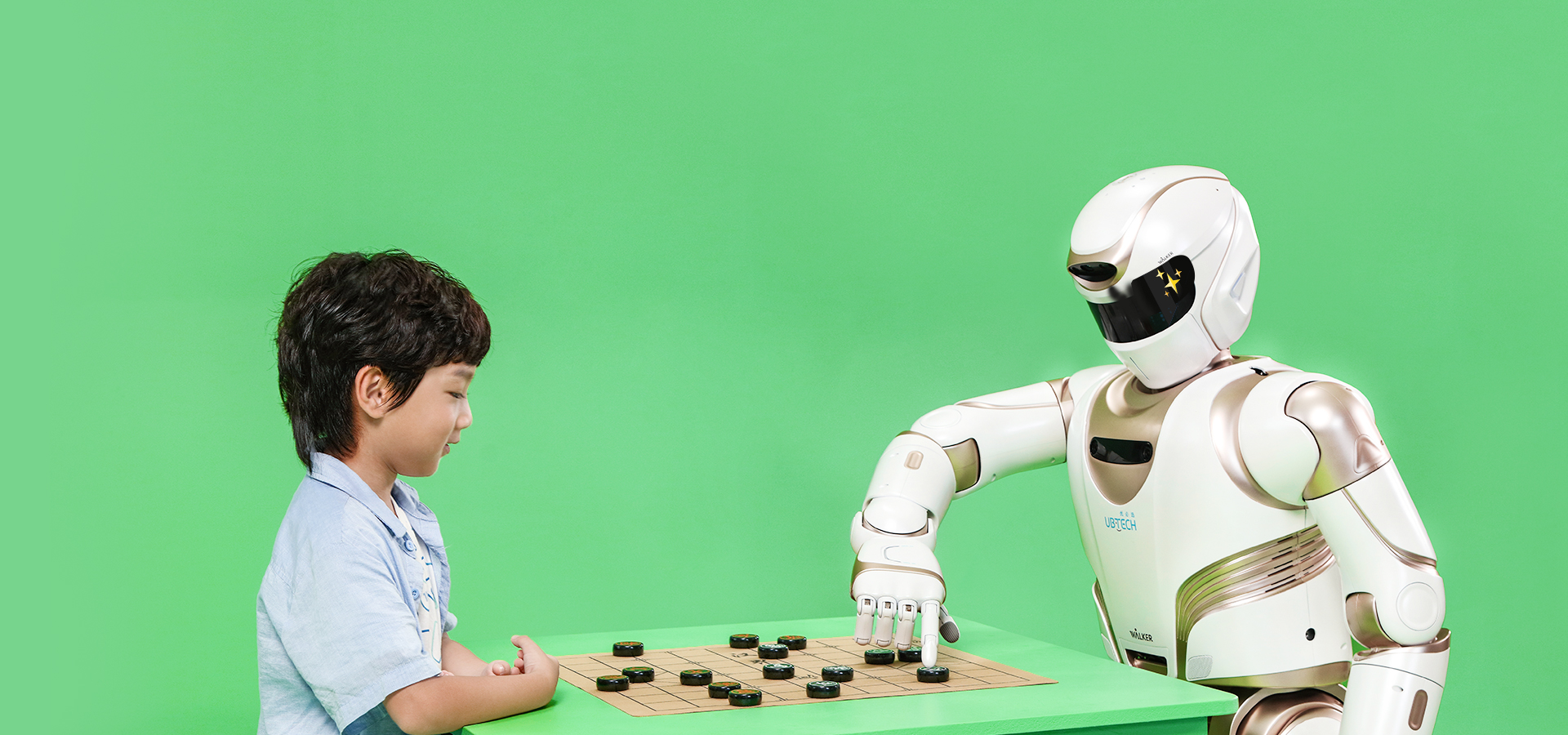
41 high-performance servo joints 160° face surrounding 4.6K HD dual flexible curved screen
160° face surrounding 4.6K HD dual flexible curved screen 4-dimensional light language system
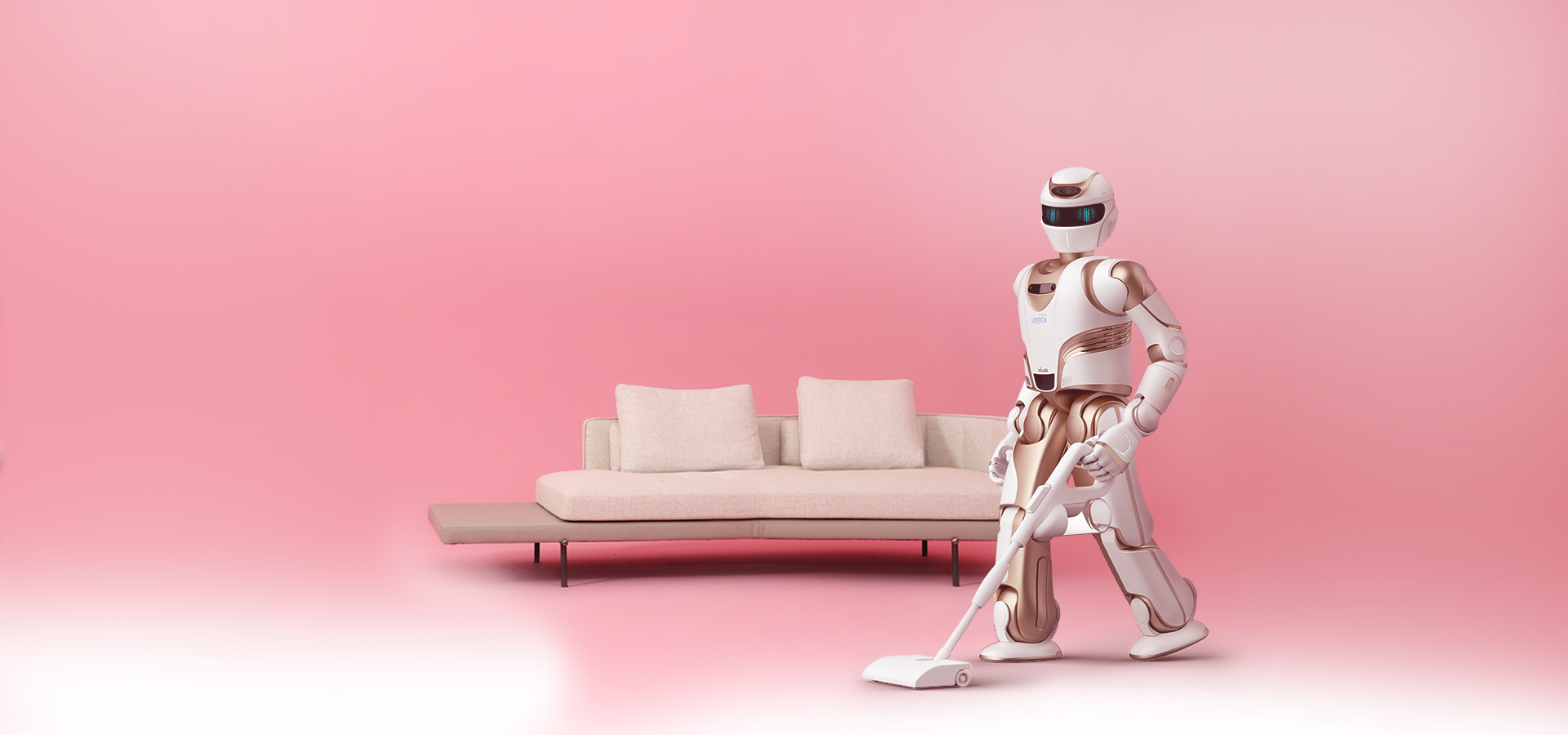
4-dimensional light language system Modular design
Modular design Convenient removable battery
Convenient removable battery
 Height: 130cm Weight: 63kg
Height: 130cm Weight: 63kg 160° face surrounding 4.6K HD dual flexible curved screen
160° face surrounding 4.6K HD dual flexible curved screen Modular design
Modular design 41 high-performance servo joints
41 high-performance servo joints 4-dimensional light language system
4-dimensional light language system Convenient removable battery
Convenient removable battery