

熊猫外观设计
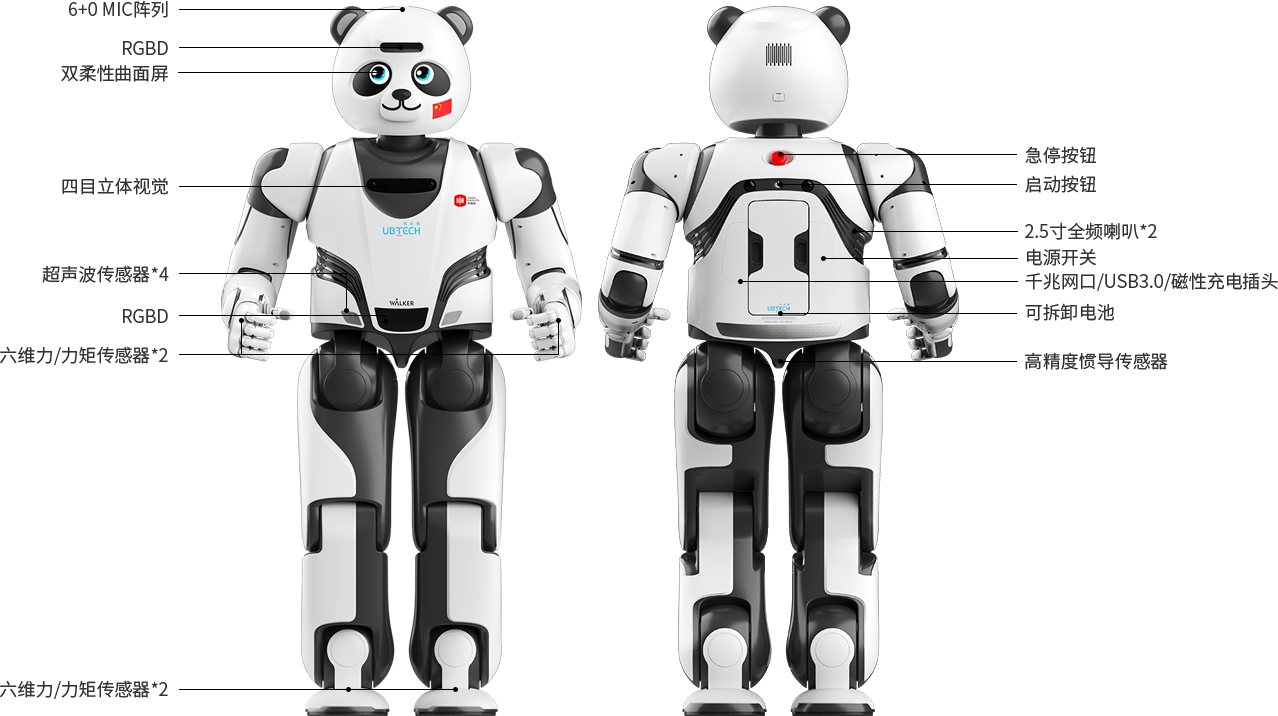
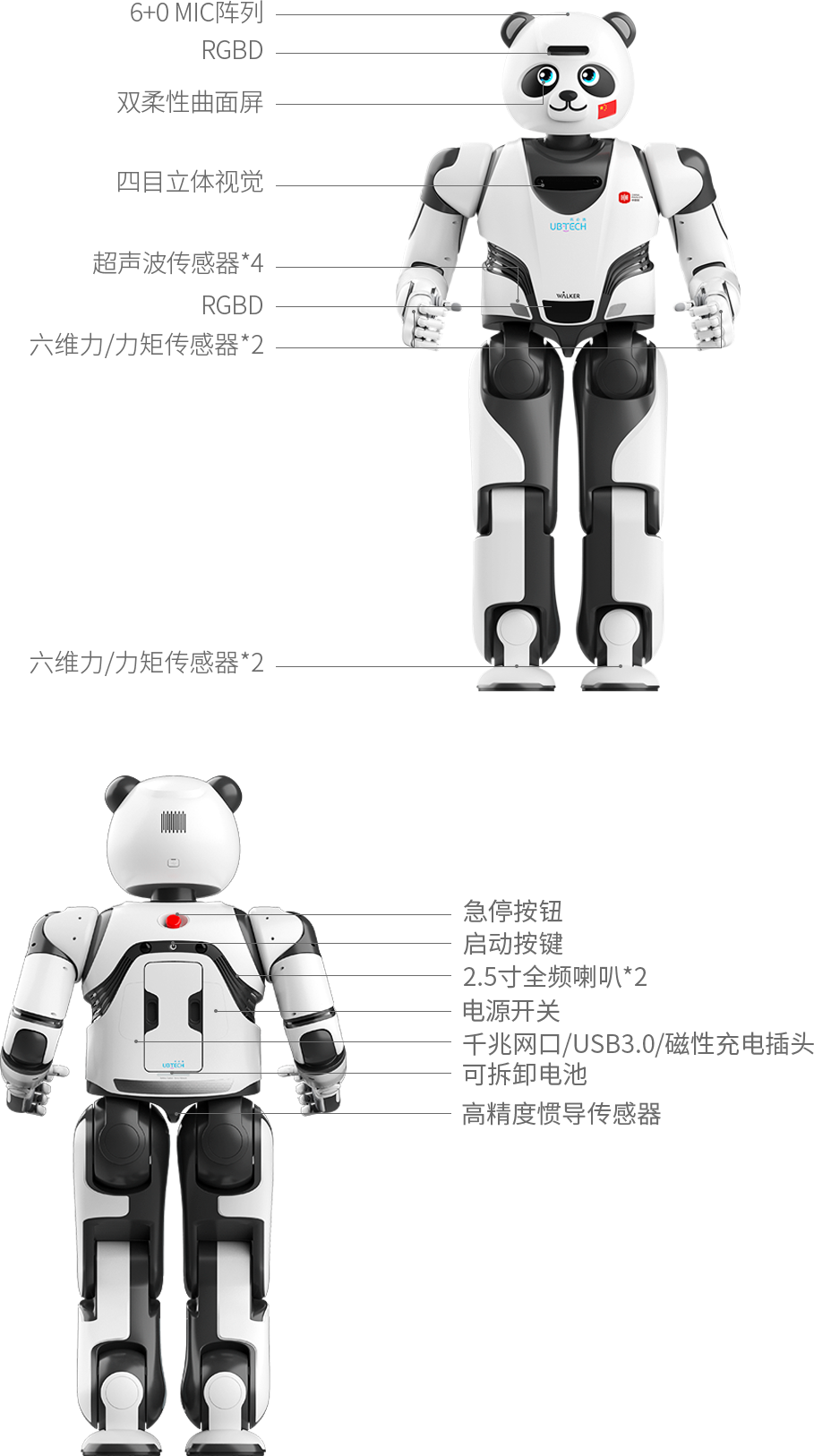
全方位感知系统

41个高性能伺服驱动关节

双柔性曲面屏、仿生化设计的眼睛

灵动酷炫的四维灯语体系

模块化设计

便捷可拆卸电池

41个高性能伺服驱动关节

双柔性曲面屏、仿生化设计的眼睛

灵动酷炫的四维灯语体系

模块化设计
便捷可拆卸电池




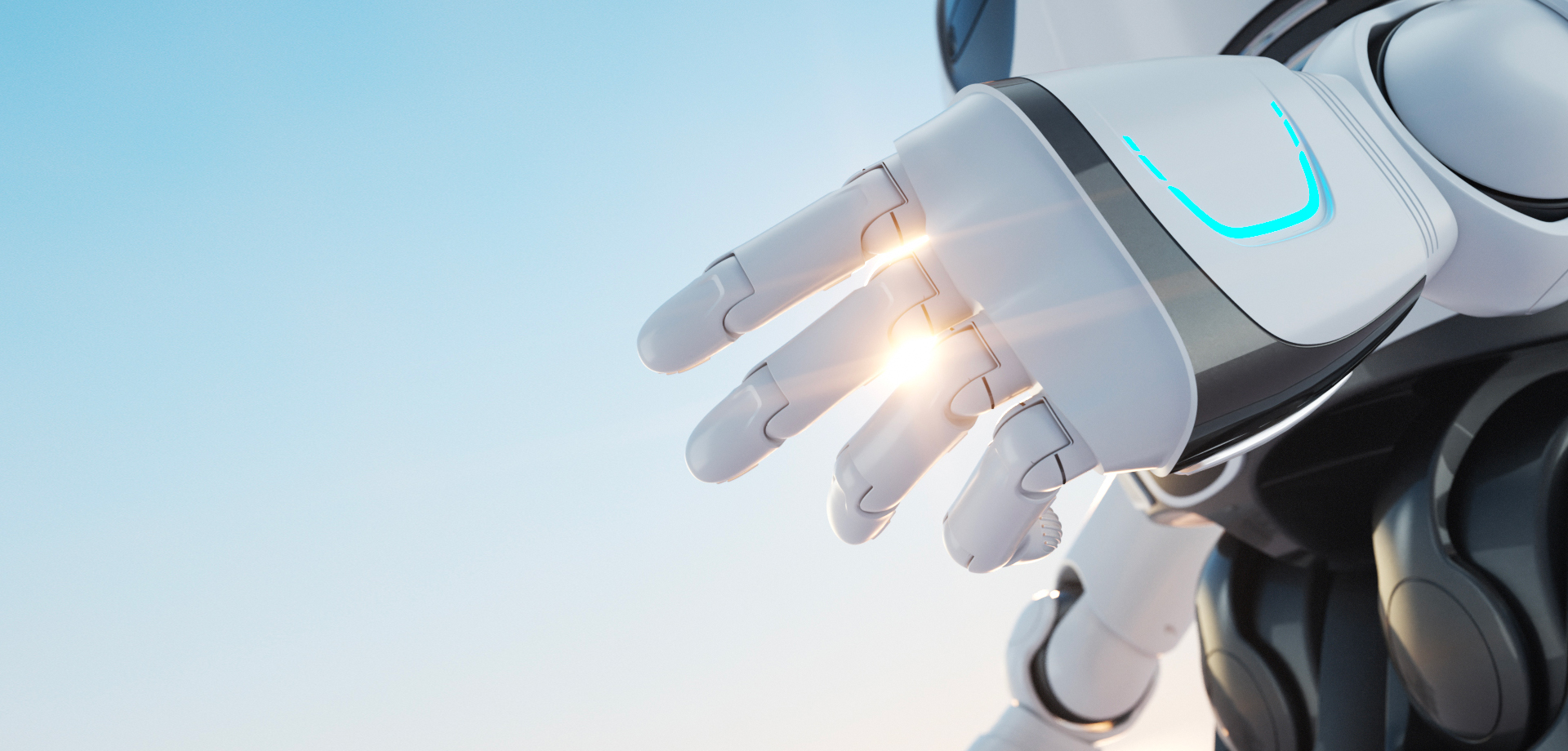
迪拜世博会中国馆和平友好使者
优必选科技以大熊猫的形象为设计原型,在大型人形机器人Walker的基础上,为迪拜世博会中国馆专属定制了熊猫机器人“优悠”。“优悠”将在中国馆的智慧生态分展区,为参观嘉宾介绍中国熊猫生态长卷、智慧农业等展项,展示富有中国传统特色的书写和画画技能,让大家了解中国历来倡导的绿色发展理念,迎接来自全球各地的观众。

41个高性能伺服驱动关节
双柔性曲面屏、仿生化设计的眼睛
灵动酷炫的四维灯语体系
模块化设计
便捷可拆卸电池
41个高性能伺服驱动关节
双柔性曲面屏、仿生化设计的眼睛
灵动酷炫的四维灯语体系
模块化设计
便捷可拆卸电池




全新升级的多模态
交互系统


视、听、触、环境
多通道感知


内置原生28+
机器人情绪体系


主动式交互
与用户建立共情


熊猫机器人“优悠” 融合文字、语音、视觉、动作、环境等多模态交互方式进行人机交互,充分模拟人的表达特征进行导览讲解。

熊猫机器人“优悠” 具备极高的自由度和运动控制能力,可以完成复杂灵活的动作,并通过平衡控制保证高难度动作的稳定性。


熊猫机器人“优悠”具备41个高性能伺服关节构成的灵巧四肢,展示其丰富的灵活度和自由度,同时可以实现多台机器人同步舞蹈表演。

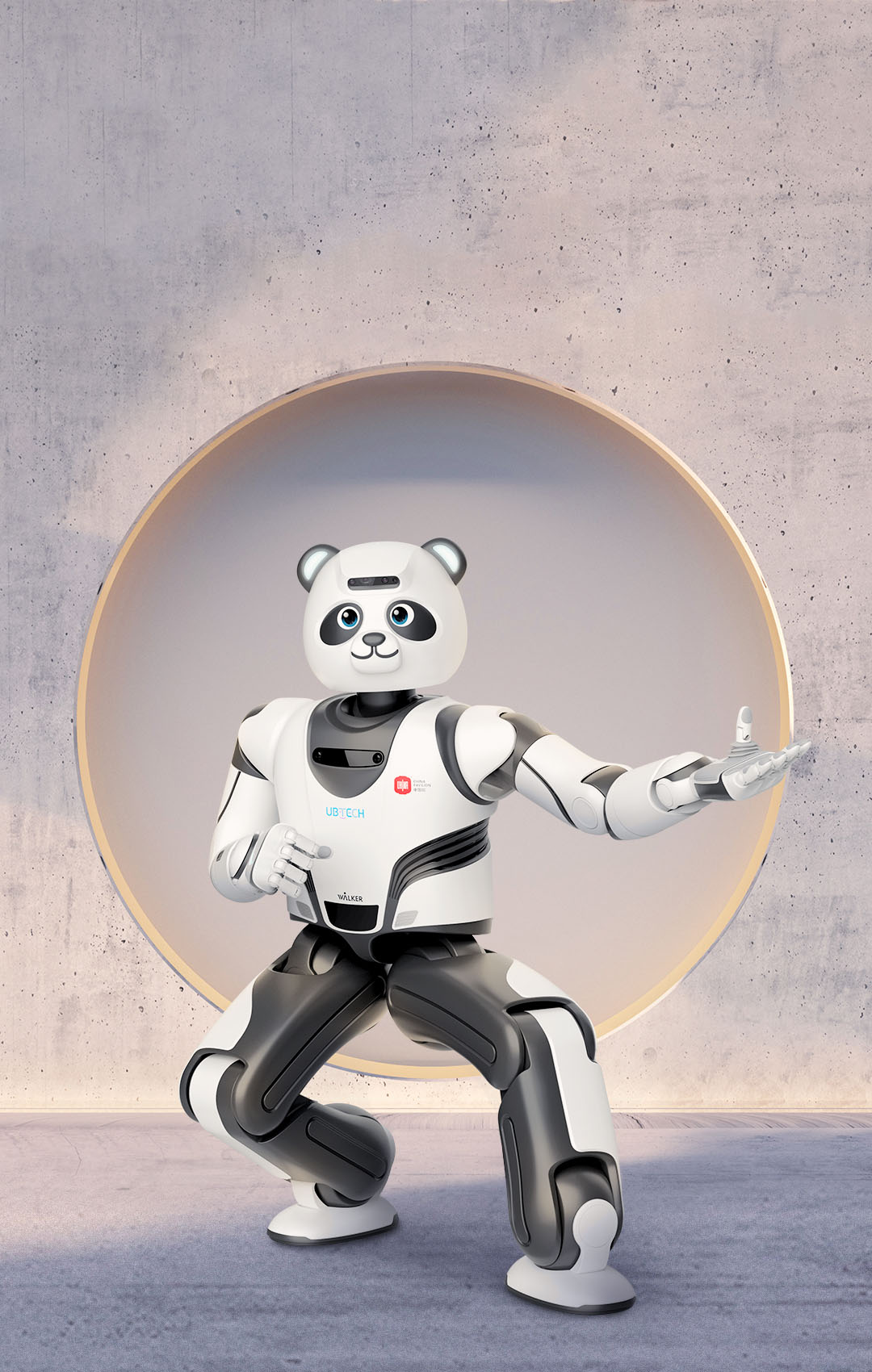
熊猫机器人“优悠”具备高性能的伺服关节,通过对字形的在线轨迹规划,高精度的轨迹跟踪以及力位混合控制,可以很好地实现书画任务。
| 身高 | 130 cm | 视觉&导航 | 定位精度10cm,导航精度20cm,精定位精度1cm |
| 重量 | 63 KG | 连接 | Wi-Fi: 802.11 a/b/g/n 5G/2.4 GHz双频 |
| 自由度 | 腿6*2;臂7*2;手6*2;颈*3 | Ethernet :千兆RJ45接口 | |
| 伺服关节 | 转矩:4.5Nm-200Nm | EtherCAT:高速实时总线 | |
| 转速:30rpm-90rpm | USB :高速3.0端口 | ||
| 行走 | 最大行走速度:3km/h | 电源 | 锂电池 54.6V/10Ah/ 3.6 kg |
| 最大不平整适应:3cm | 充电:2h; 使用(综合工况):2h | ||
| 最大上下台阶高度:15cm | 处理器 | Intel i7 8665U 频率1.9Ghz *2 | |
| 最大上下斜坡角度:20° | NVIDIA GT1030显卡,384核心 | ||
| 操作 | 负载:伸展状态单臂1.5kg | 软件系统 | 软件框架:ROSA |
| 臂展:单臂600mm | 操作系统:Ubuntu+ Linux RT Preempt+Android | ||
| 仿真平台:Webots |
| 身高 | 130 cm |
| 重量 | 63 KG |
| 自由度 | 腿6*2;臂7*2;手6*2;颈*3 |
| 伺服关节 | 转矩:4.5Nm-200Nm |
| 转速:30rpm-90rpm | |
| 行走 | 最大行走速度:3km/h |
| 最大不平整适应:3cm | |
| 最大上下台阶高度:15cm | |
| 最大上下斜坡角度:20° | |
| 操作 | 负载:伸展状态单臂1.5kg |
| 臂展:单臂600mm | |
| 视觉&导航 | 定位精度10cm,导航精度20cm |
| 精定位精度1cm | |
| 连接 | Wi-Fi: 802.11 a/b/g/n 5G/2.4 GHz双频 |
| Ethernet :千兆RJ45接口 | |
| EtherCAT:高速实时总线 | |
| USB :高速3.0端口 | |
| 电源 | 锂电池 54.6V/10Ah/ 3.6 kg |
| 充电:2h; 使用(综合工况):2h | |
| 处理器 | Intel i7 8665U 频率1.9Ghz *2 |
| NVIDIA GT1030显卡,384核心 | |
| 软件系统 | 软件框架:ROSA |
| 操作系统:Ubuntu+ Linux RT Preempt+Android | |
| 仿真平台:Webots |