全方位感知系统
Walker S搭载了41个高性能伺服关节以及多维力觉、多目立体视觉、全向听觉和惯性、测距等全方位的感知系统;
具备行业领先的多模态传感器融合技术、动态环境反馈整合和自主环境探索技术等,全方位感知环境与人事物。
Walker S搭载了41个高性能伺服关节以及多维力觉、多目立体视觉、全向听觉和惯性、测距等全方位的感知系统; 具备行业领先的多模态传感器融合技术、动态环境反馈整合和自主环境探索技术等,全方位感知环境与人事物。


优必选全新推出工业版人形机器人Walker S,
外观比例更接近人类,具备全方位感知系统,
其自主运动及决策能力大幅提高,
可在工厂流水线实现精准安全同步的作业,
赋能新型工业化,助力汽车工业高质量发展。
全地形自主通过
小脑自平衡
多模态大模型决策
手眼协调与全身操作
U-SLAM+3D点云语义导航
人体与全环境感知
多模态人机交互
机器人操作系统ROSA 2.0
GUI、远程操作与AIOT

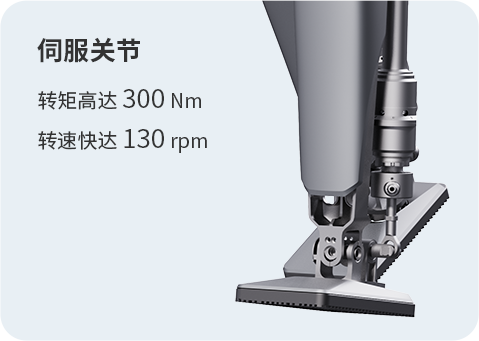
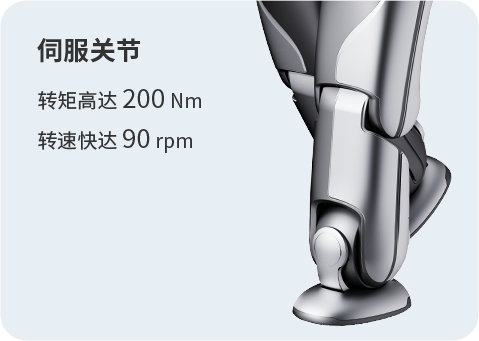
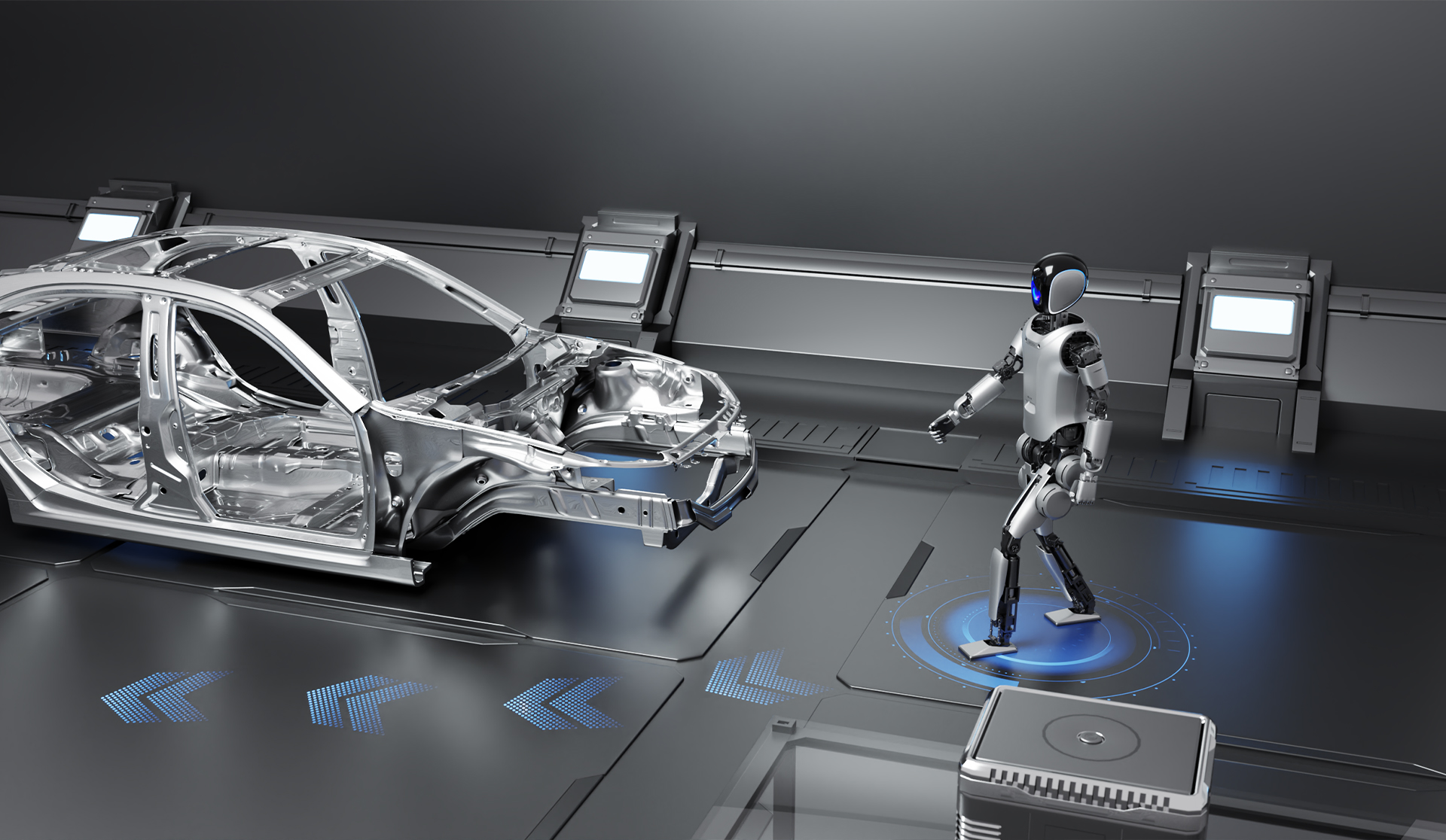
身高1.7米,搭载了全新一代融合控制算法、高爆发与力柔顺驱动关节、刚柔耦合混连结构等全新构型提升了整机的运控能力,能在工业场景的移动产线上稳定步态行走。
Walker S搭载了41个高性能伺服关节以及多维力觉、多目立体视觉、全向听觉和惯性、测距等全方位的感知系统;
具备行业领先的多模态传感器融合技术、动态环境反馈整合和自主环境探索技术等,全方位感知环境与人事物。
Walker S搭载了41个高性能伺服关节以及多维力觉、多目立体视觉、全向听觉和惯性、测距等全方位的感知系统; 具备行业领先的多模态传感器融合技术、动态环境反馈整合和自主环境探索技术等,全方位感知环境与人事物。
Walker S用自己的“眼睛”——数颗高分辨率的RGBD视觉传感器来自主观察周围环境与建立3D语义地图,
设计高精度行走轨迹和准确避障,可在工业环境中实现精准安全同步的作业。
Walker S用自己的“眼睛”——数颗高分辨率的RGBD视觉传感器来自主观察周围环境与建立3D语义地图, 设计高精度行走轨迹和准确避障,可在工业环境中实现精准安全同步的作业。

Walker S与大模型技术深度融合,在已有的多模态感知与运动控制能力上,获得更高级的意图理解能力和细粒度规划能力,在不同环境中执行多样化任务。
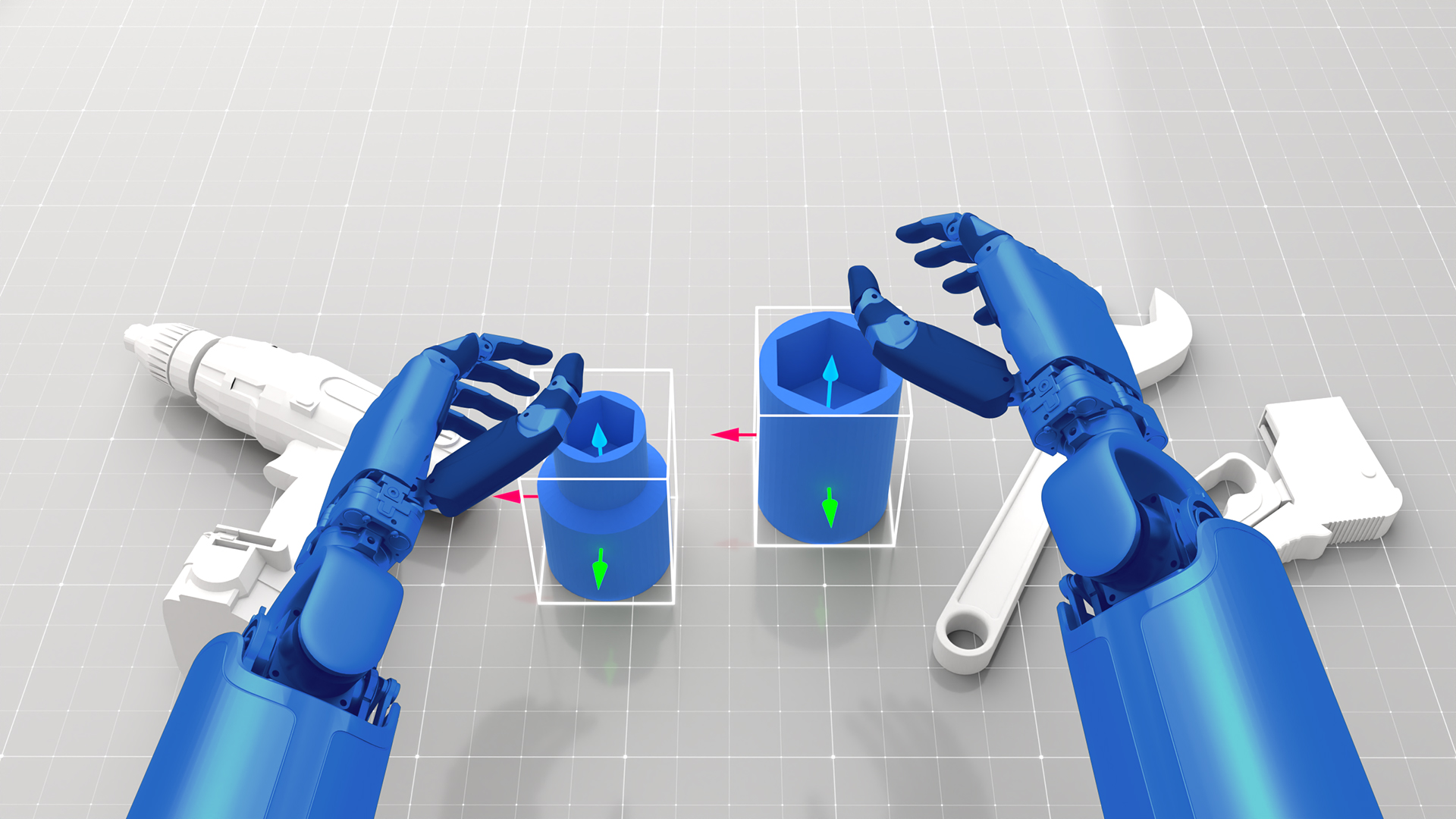
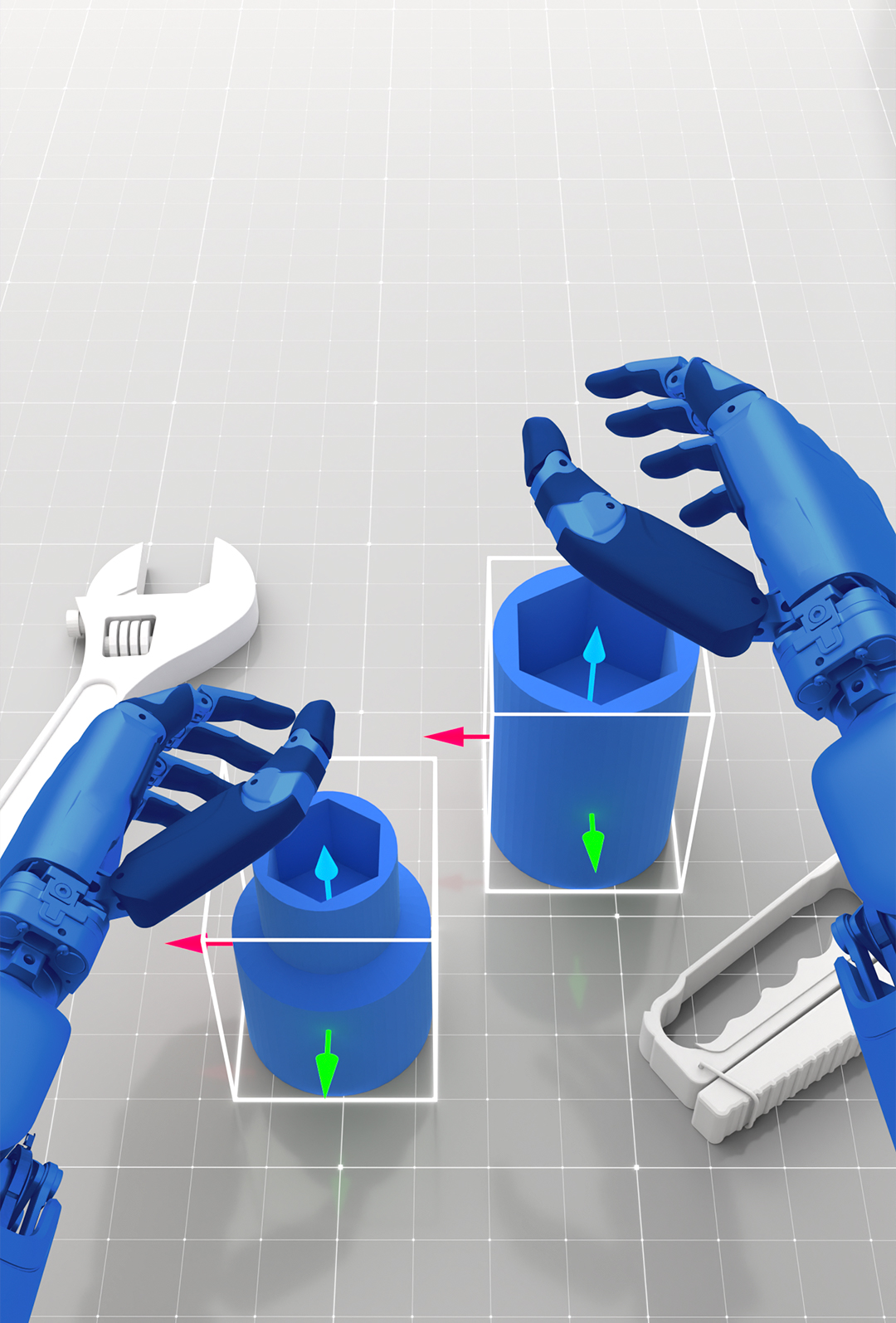
通过处理工业场景下的3D点云信息,Walker S能精准识别复杂结构物体的6D位姿,
并结合手眼协调能力,决定合适的抓取策略,完成抓取工作。
通过处理工业场景下的3D点云信息,Walker S能精准识别复杂结构物体的6D位姿, 并结合手眼协调能力,决定合适的抓取策略,完成抓取工作。
Walker S可与工厂系统互通,获得产线状态及信息,实时回传采集数据并传输至工厂系统,实现信息的即时共享。