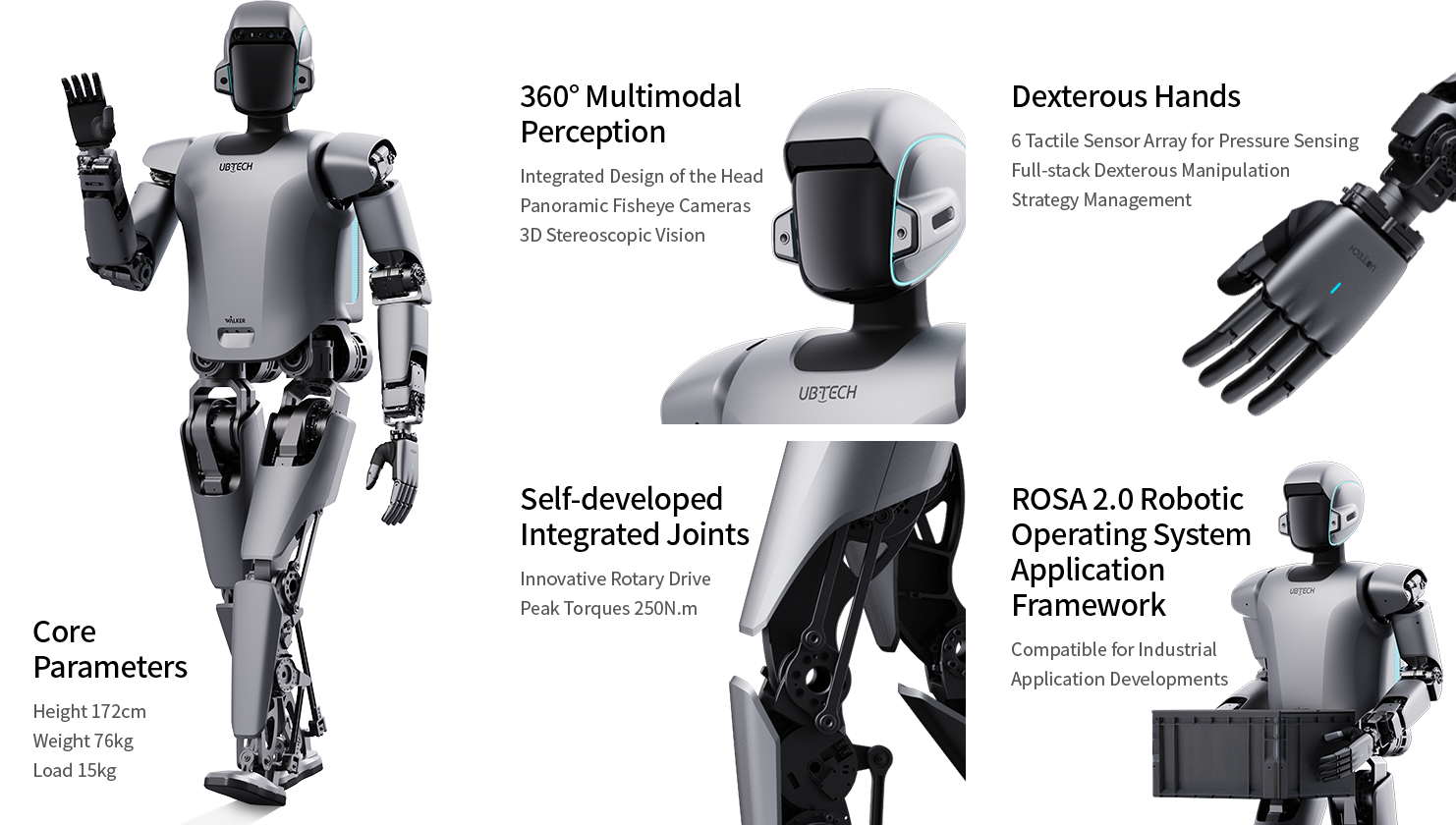
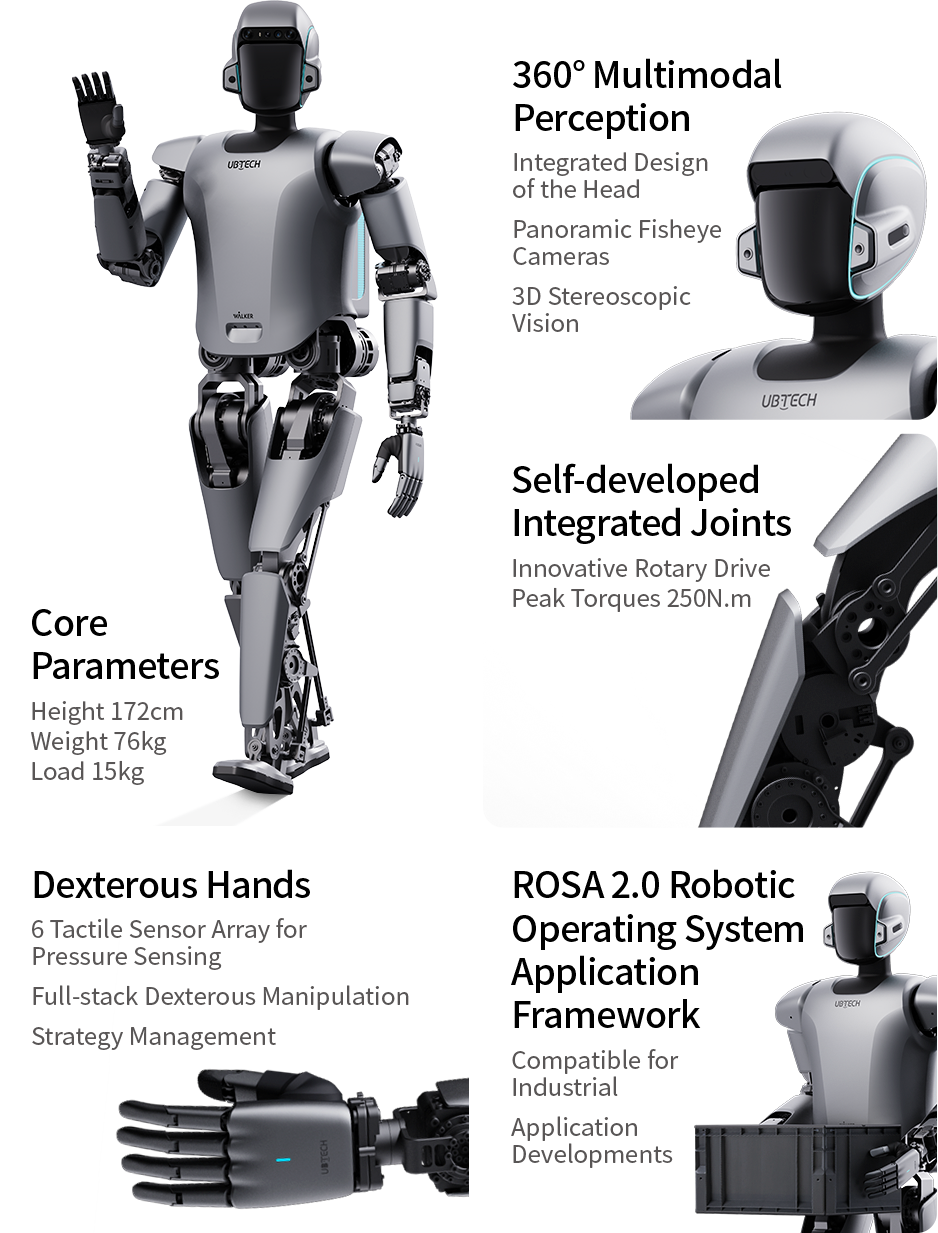
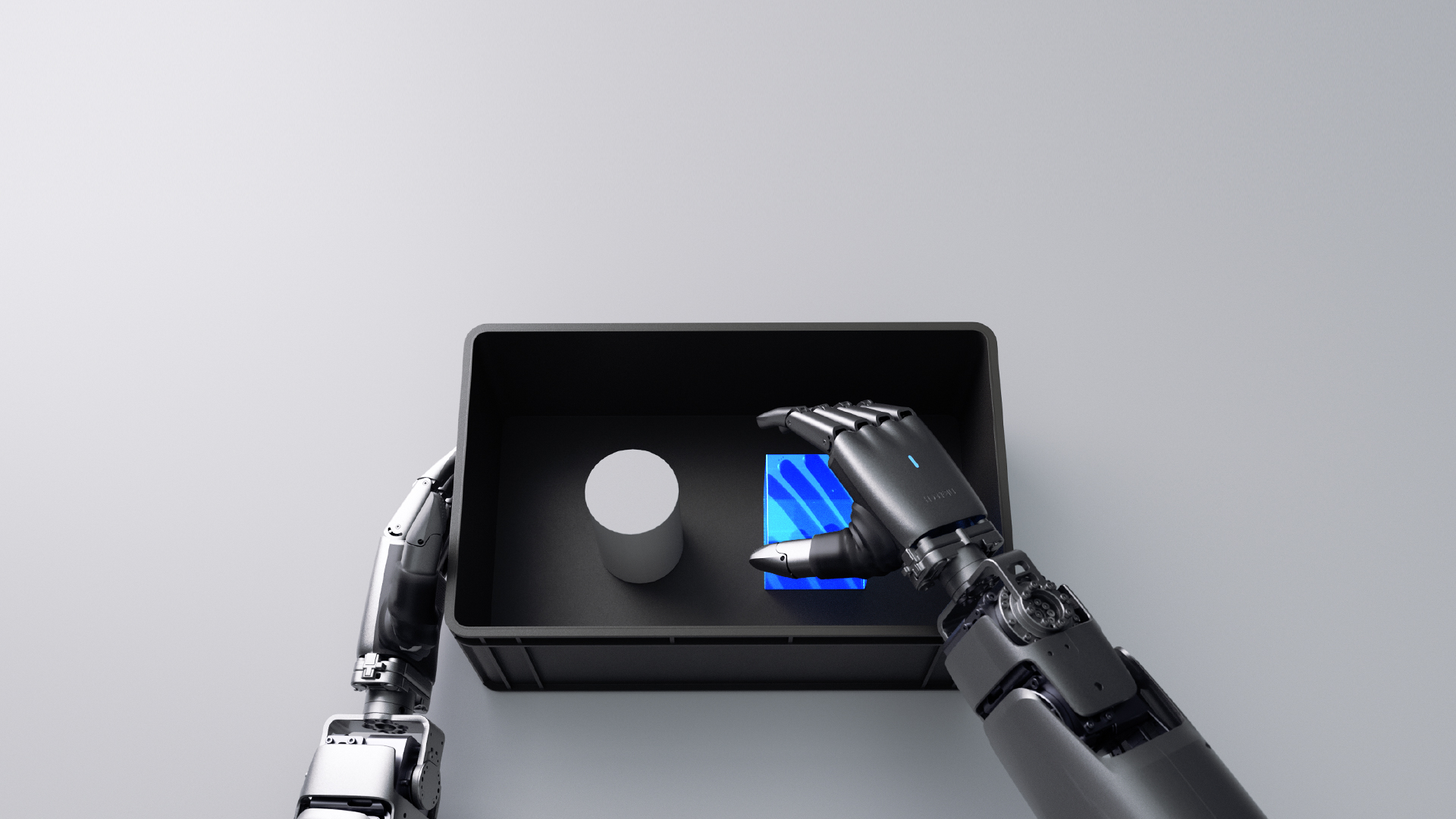
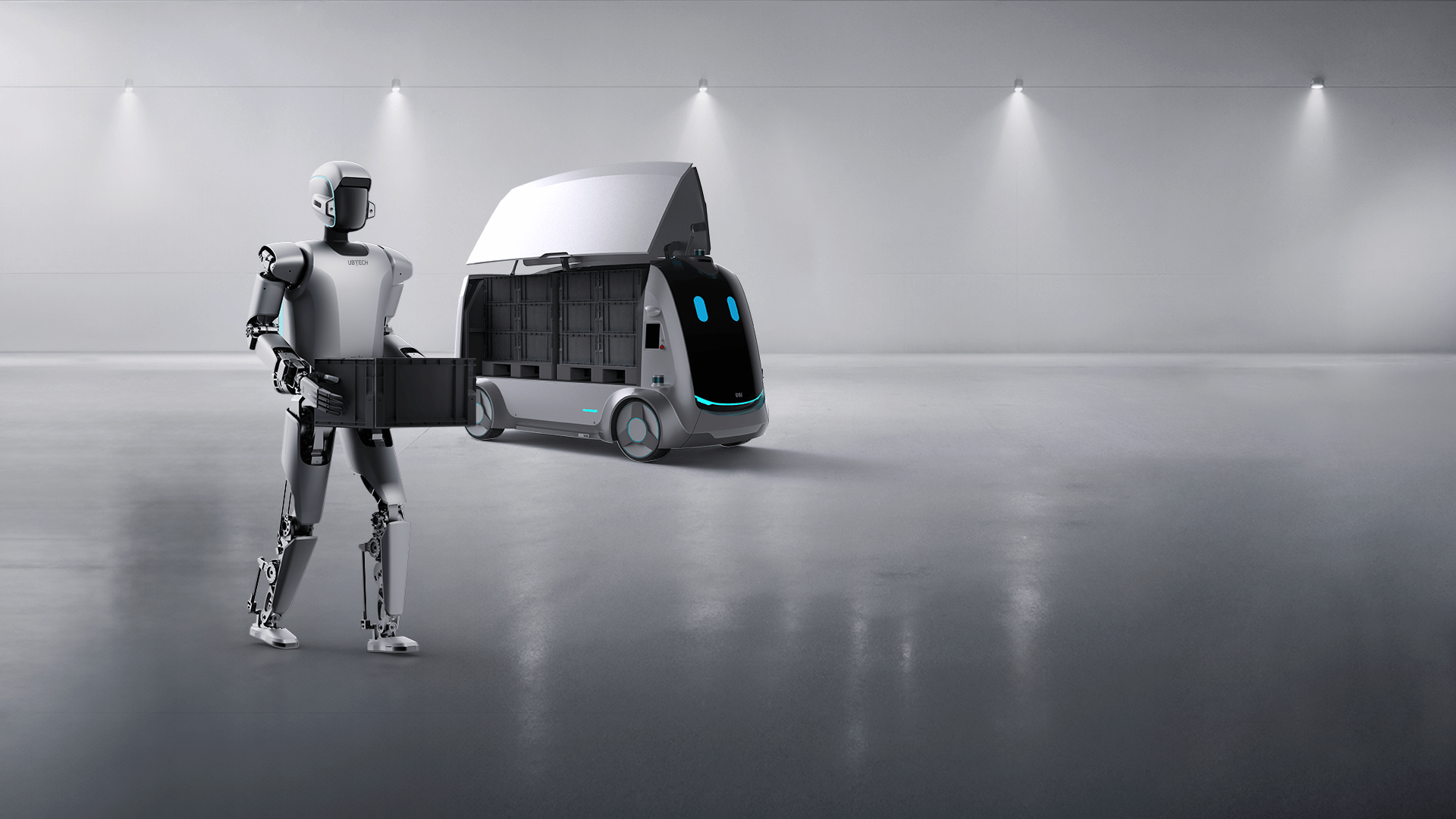
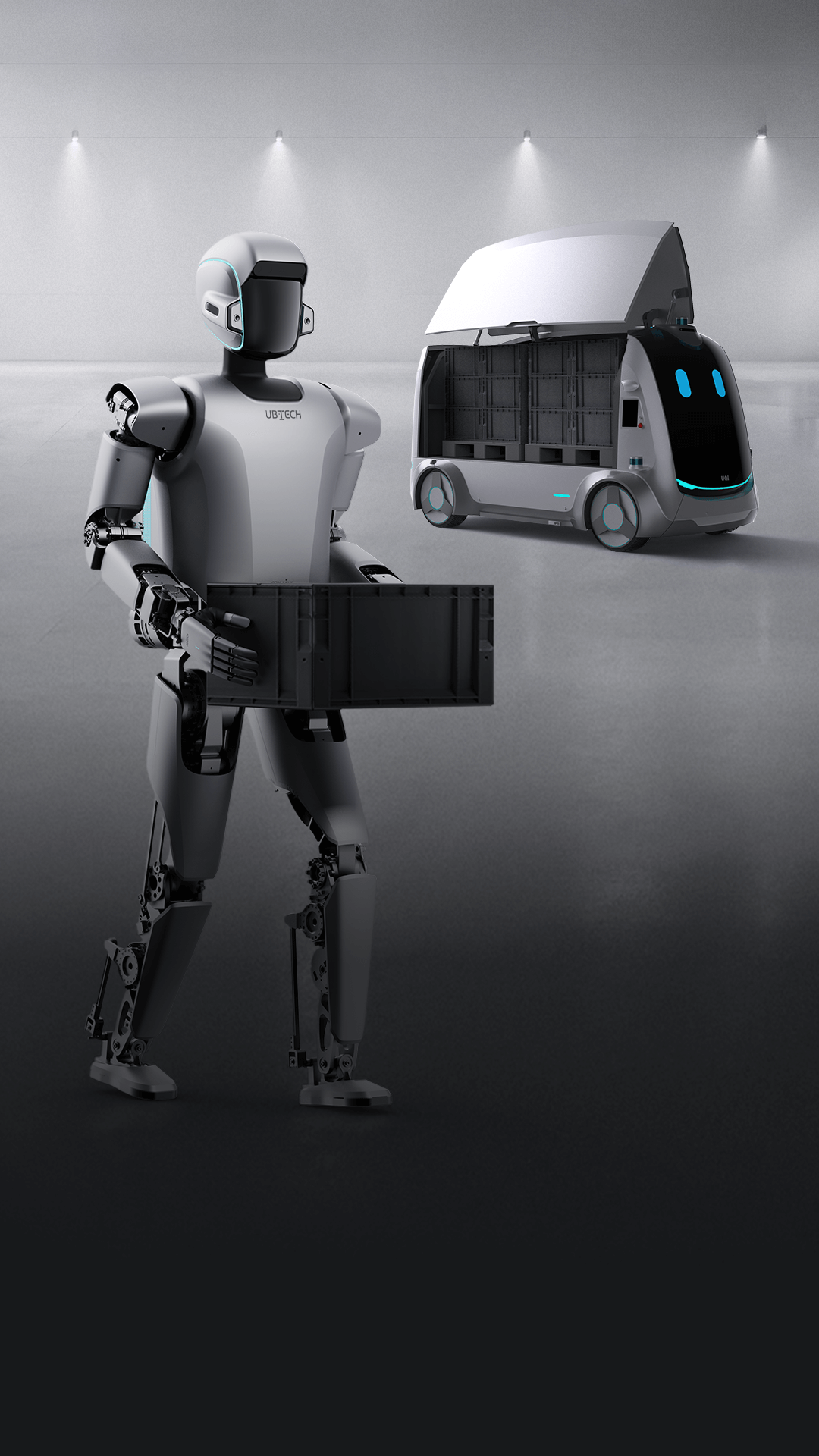
Leveraging its full-stack humanoid robotic technologies, UBTECH has developed embodied intelligence technologies that have endowed Walker S1 with smart brains and agile cerebellums, thereby meeting the generalization needs in industrial scenarios.
Partners