Walker's Virtual Simulation
Walker's Virtual Simulation
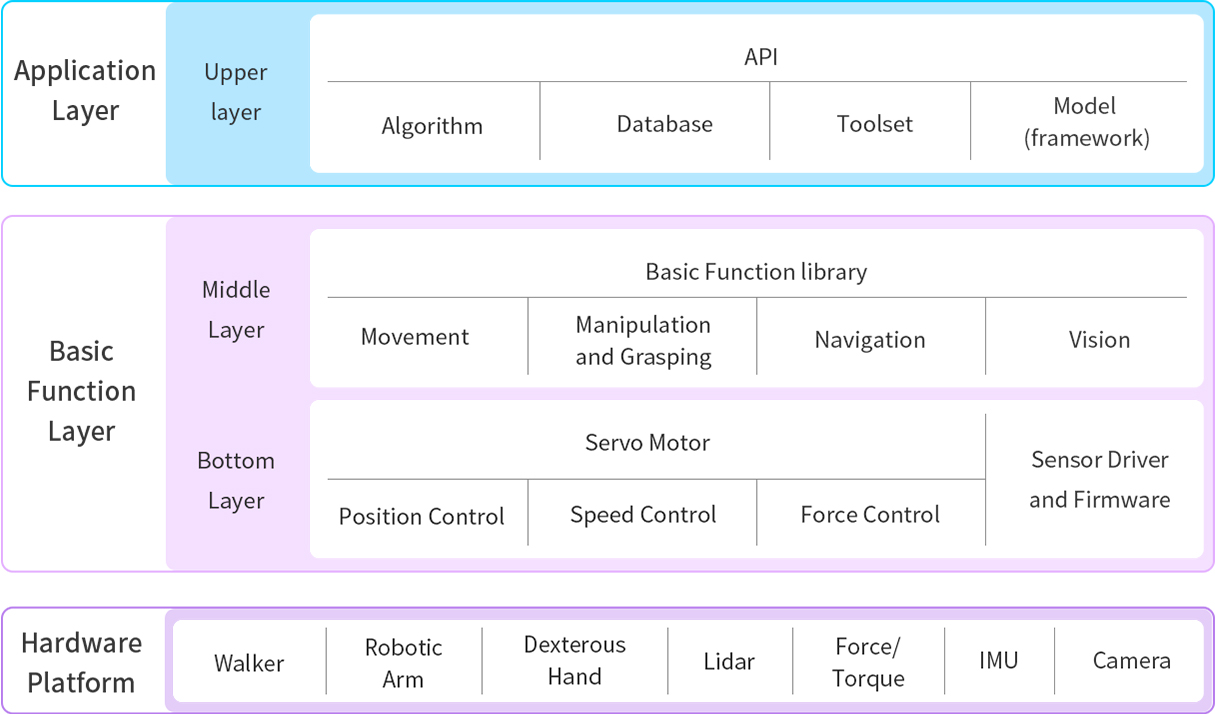
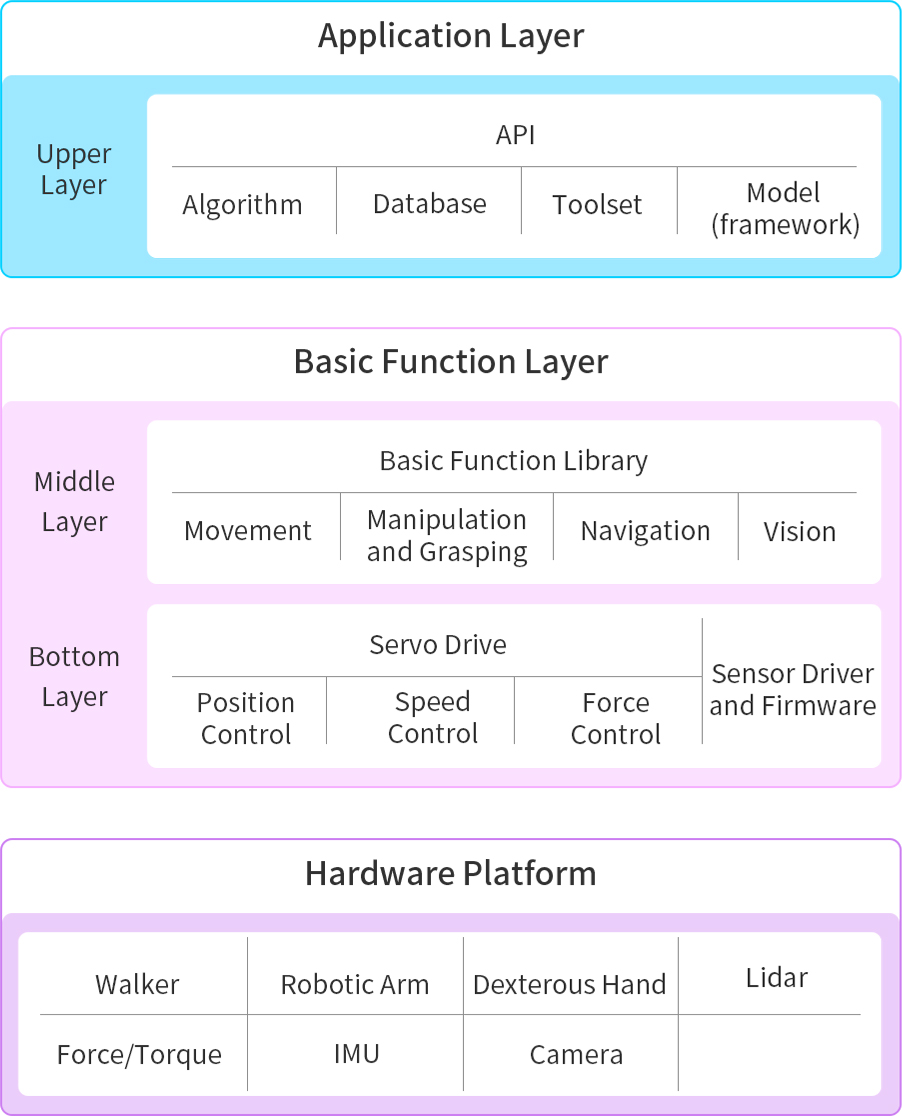
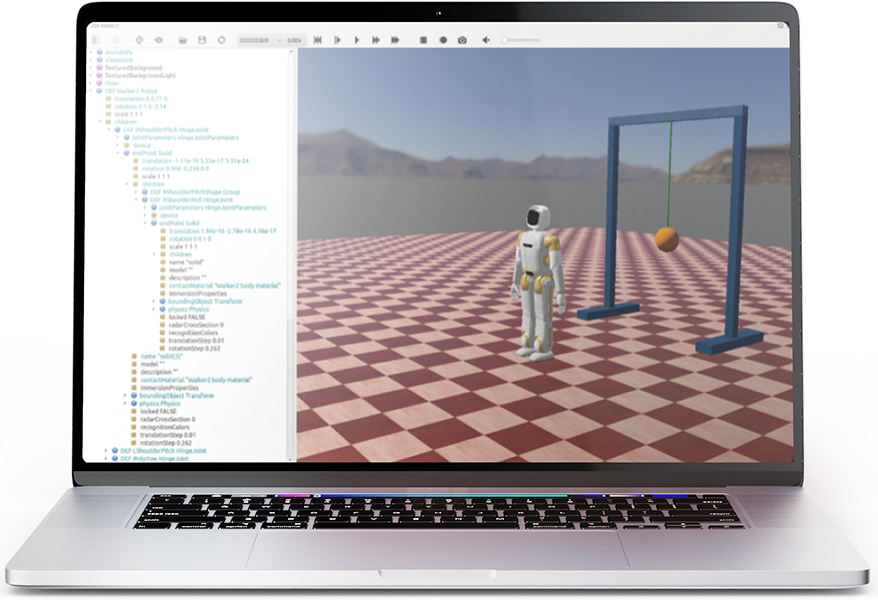
Walker's virtual simulation was developed based on an open-source dynamics engine and a 3D rendering engine. Combined with the ultra-realistic simulation environment and a vast number of sensor configurations, Walker's virtual simulation allows for porting and reuse of simulation code on the machine, which can significantly boost the development efficiency.
System Architecture
Function Demonstration
Push Recovery
Multiple Terrain Adaption
Footprint Planning
Opening the Refrigerator
Going up the Stairs
Pushing a Cart
Core Features

Multi-Sensor Models And Interfaces

Precise Robot Simulation Model

Multiple Virtual Environment Scenarios

Robot Control Interfaces and Documents
Basic Demo Validation
Product Strengths

Multiple Interfaces
Support of C, C++, Python, Matlab, and ROS.
Multiple Sensors
Position sensors, speed sensors, torque sensors, etc.
Diverse Scenarios
Multiple scenarios or environments can be selected to expand the educational research and competition platform.
Cases
Humanoid Service Robot Simulation Challenge
UBTECH and SYNCED jointly held the "Walk into the Future -Humanoid Service Robot Simulation Challenge" at the 2020 WAIC Summit. In this challenge, the Walker model and related data were opened to challengers. Universities, research institutions and leading developers worldwide were invited to participate in this competition. Fifteen development tasks of varying levels of difficulty were completed.